Motion VR Cockpit Project
Donate with PayPal
Buy Me a Coffee

MOTION VR COCKPIT

I am proud to share my home-built Motion VR Cockpit design with Flight Simulation community! I believe it can bring your Flight Simulation experience to the whole new level. It certainly did mine. My goal was to design and build an amazing platform that combines a full-fledged universal Motion Simulator with custom-designed controls that let you fly GA aircraft, Turboprops, Airliners and Helicopters in VR in a compact form factor and an unbelievable budget of under $500. Its features rival comparable off-the-shelf systems that would carry a whopping $4000+ budget to include similar functionality.
Important note: this is not a commercial product, unlike my airports, nor is it in a state comparable to a commercial DIY kit plan. I am sharing all the files and plans I created for my personal enjoyment in a form of a free download. Optional donation amount is only a form of supporting my Flight Simulation projects. This is not a direct payment for the files, nor is it an obligation on my part for any form of technical support. Be prepared for the files not making sense at first, and needing modifications and adjustments. I tried to name and organize the files logically, but there is no proper documentation. Treat my project files as a good starting point and examples of what you can do. I am not responsible for any damage you cause to yourself or your hardware by using my files. Just running my configuration files on your rig without adjusting for your setup will not work, and may crash your rig and cause damage. Powerful motors and high currents and voltages are not a joke. Your safety is your responsibility.
MOTION VR COCKPIT – BACKGROUND
I want to share a latest iteration of my Motion VR Cockpit simulator project. I became interested adding some motion to VR, but I quickly learned that commercially available motion rigs are very expensive, and there is no motion compensation solution for WMR OpenXR (Reverb G2) yet, rendering some solutions like Yaw VR unsuitable. So that was disappointing. Then I learned that people are building those rigs themselves. I read about that and I was hooked. Research followed, parts were ordered, and soon I started building. The budget is only about $430. It’s literally about 10% of what you would pay for an off-the-shelf comparable system, and I don’t believe there even is one that can be customized quite this way.
When I finished the initial tuning and tried it in VR on my HP Reverb G2 for the first time, I was speechless. The result surpassed my expectations. Similar to switching to VR, this is another moment of
OH MY GOD!!! This is what VR is meant to be! I can never go back now…
This is what I wanted, the project is so worth a few days’ work invested in it and more. I can never go back from VR+motion for flight simulation now, that’s official! The level of realism and immersion is like going from pancake to VR again. In recent months I have followed up upgrading, adding features, and building new devices to my motion rig, making it a full-blown Motion VR Cockpit. I added all the controls that was feasible to train my muscle memory for using while wearing the HMD.
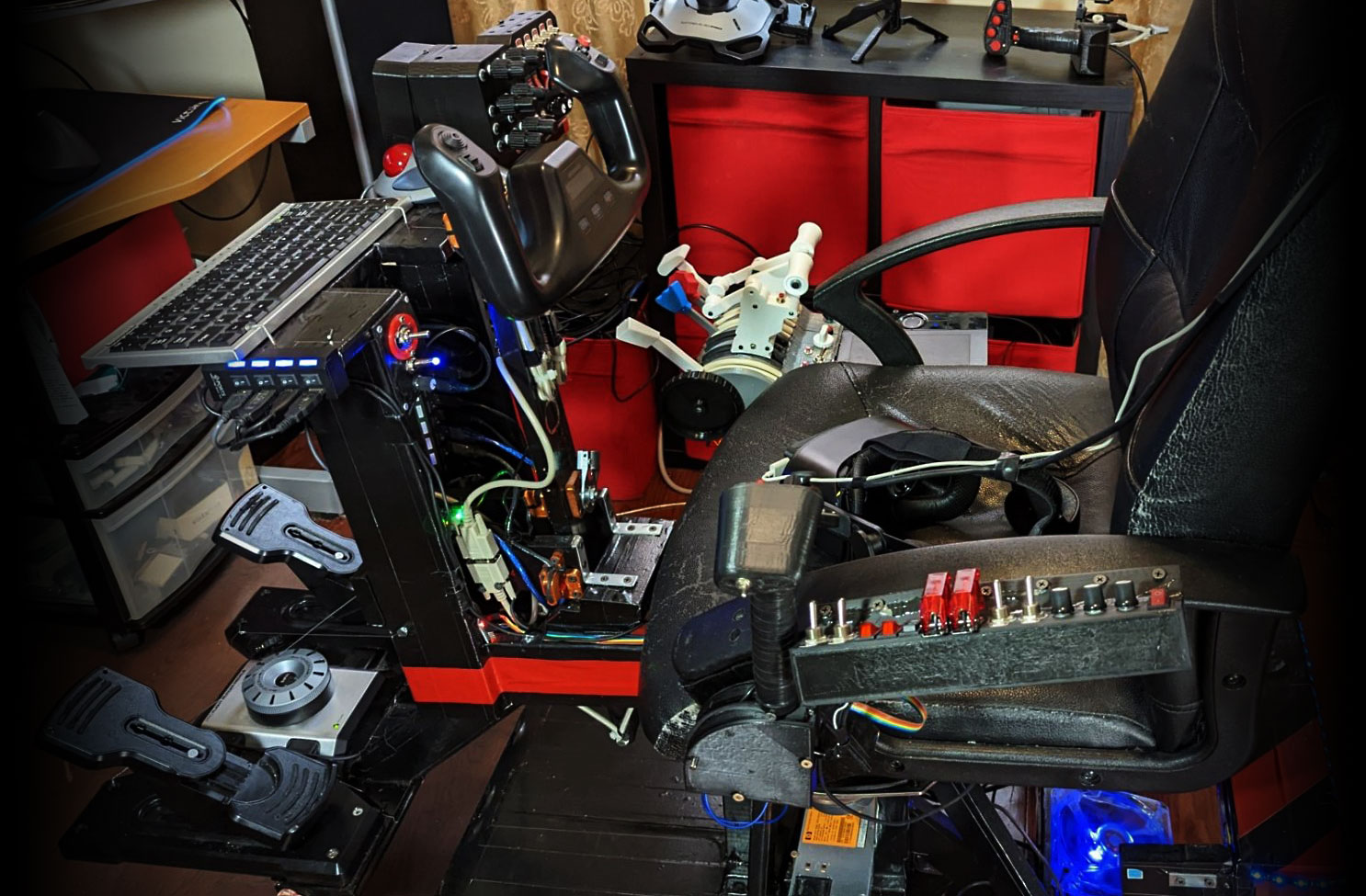
I engineered, 3D-printed, built and programmed a bunch of custom-designed devices: large-throw Pendular Yoke that converts to a large-throw Joystick / Cyclic controller, 6 Dual Encoder and 8-button VR Control Box, Switch Box with Gear lever, 8-axis Throttle Quadrant with thrust reversers and trim wheel, HOTAS Throttle that converts to a heli Collective along with another switchbox, DIY vibration transducer system (buttkickers).
MOTION SIMULATOR FEATURES
- 2x 12V motors: 180 WATTS (.24 HP), 50:1 gear ratio, 60NM torque
- Arduino Uno R3 with customized SMC3 firmware
- IBT2 Motor Drivers
- FlyPT Mover
- DIY vibration transducers (buttkickers) connected to SimShaker for Aviators + Sound Module
- HP 750W power supply,
- Custom-built hall sensor pendular Yoke, convertible to a 3D-printed joystick
- Custom 3D-printed VR dual encoder control box
- Custom 3D-printed VR Switch and Gear box
- Custom 3D-printed 6-axis Boeing style Throttle Quadrant with Thrust Reversers, TO/GA and A/T disconnect buttons and Trim Wheel.
- Reverb G2 WMR HMD
- Microsoft Flight Simulator.
- OpenXR Toolkit
- Construction is mostly wood, with DIY universal joint made of 4 pillow block bearings; repurposed office chair.
FEATURE HIGHLIGHTS















MOTION VR COCKPIT – BACKGROUND
I want to share a latest iteration of my Motion VR Cockpit simulator project. I became interested adding some motion to VR, but I quickly learned that commercially available motion rigs are very expensive, and there is no motion compensation solution for WMR OpenXR (Reverb G2) yet, rendering some solutions like Yaw VR unsuitable. So that was disappointing. Then I learned that people are building those rigs themselves. I read about that and I was hooked. Research followed, parts were ordered, and soon I started building. The budget is only about $430. It’s literally about 10% of what you would pay for an off-the-shelf comparable system, and I don’t believe there even is one that can be customized quite this way.
When I finished the initial tuning and tried it in VR on my HP Reverb G2 for the first time, I was speechless. The result surpassed my expectations. Similar to switching to VR, this is another moment of
OH MY GOD!!! This is what VR is meant to be! I can never go back now…
This is what I wanted, the project is so worth a few days’ work invested in it and more. I can never go back from VR+motion for flight simulation now, that’s official! The level of realism and immersion is like going from pancake to VR again. In recent months I have followed up upgrading, adding features, and building new devices to my motion rig, making it a full-blown Motion VR Cockpit. I added all the controls that was feasible to train my muscle memory for using while wearing the HMD.
I engineered, 3D-printed, built and programmed a bunch of custom-designed devices: large-throw Pendular Yoke that converts to a large-throw Joystick / Cyclic controller, 6 Dual Encoder and 8-button VR Control Box, Switch Box with Gear lever, 8-axis Throttle Quadrant with thrust reversers and trim wheel, HOTAS Throttle that converts to a heli Collective along with another switchbox, DIY vibration transducer system (buttkickers).
Here’s a summary of what I feel after starting to use my rig:
Pancake Simming: you are looking at a plane that you are flying. Fully disconnected.
VR: you ARE INSIDE the plane that you are flying.
Motion rig + VR + Custom Controls: you ARE INSIDE and FEEL LIKE YOU’RE INSIDE the airplane.
It really affected the way I fly – much more like in real airplane I avoided sudden control movements, steep turns and hard landings (other than for testing) and tried to fly smooth, so I won’t be jerked around. It got my flying much closer to realistic instantly. The difference is between knowing you shouldn’t make sudden movements but not feeling anything when you do, and actually feeling everything you do with your controls. And a hard landing would really kick your butt hard!
It’s just 2DOF, but this is another level of immersion. This is amazing, I was grinning and laughing during my first test flight. When I stopped after a hard emergency landing, I just started laughing for a minute like an idiot, and couldn’t stop. And I’m still grinning each time I have a hard landing, do a high-G maneuver, or break too fast.
DESIGNING THE RIG
I designed a rough 3D Sketch in Blender to visualize the rig. I then run the approximate dimensions in SimCalc to make sure the geometry makes sense. I highly recommend researching XSimulator forums, people are very knowledgeable and helpful there. You can check out my Motion Simulator thread there.
The Motion Simulator is driven by an Arduino Uno Rev3 board running SMC3 customized firmware, and a custom-designed profile on FlyPT Mover software.
Yoke / Joystick, HOTAS / Collective and Throttle Quadrant were programmed on Arduino Leonardo and Arduino Pro Micro boards. Arduino programs are included in my file packages.
Encoder Box and Switch Box with Gear Lever were programmed in MobiFlight, which also controls some of the other control’s axes and runs on Arduino Mega R3.
BUILDING THE RIG
The frame is mostly build of wood, 1×4″, some 2×4″ pieces and other scraps of lumber I had lying around. Off-the-shelf rigs and most DIY rigs are made of metal – steel and/or aluminum, however that drastically raises the cost and required machinery. I don’t have a welder nor the space to use it. Some say that metal frame can be too jarring. Wood gently dampens the jerking motion, acting like a gentle filter, resulting in better “air” feeling.
The only custom parts that I did not fabricate are motor arms, which were cut and welded by a good friend of mine. Depending on your motors and tools available you would have different options for motor arms.











BUDGET – UNDER $500
Total budget was ~$430 in my case, but if you add PSU and lumber and bolts with nuts and washers it gets to ~$510. Your mileage may vary, depending on what materials you already have and what you may get. No taxes were paid on any of that but pillowbox bearings, as most of the rest is Ali Express and motors are from Ebay (new).
I’m not counting old pedals which I already had, but I could just as easily make my own. Actually I am considering doing that and making pendular pedals would would feel much more realistic. Cost is really $10 (3 pots and Arduino Leonardo/Micro) plus some scrap wood and bungees, it’s just the design and making that’s a lot of work and I’m OK with Saitek for now… Also not counting 3D printer plastic, but it’s so cheap it would amount to maybe $10 at the most, and if you have a 3D printer like I do, it’s probably just sitting there and would just spoil in a couple of years unless you print something…
You may manage even smaller budget than mine, if you can get suitable truck wiper motors or wheelchair motors from a local scrap yard for a few dollars. Many people reported success with such motors, while I bought new motors on eBay, adn they are the most expensive part of the project.
My budget:
- Motors: PGSAW 12V 75-80RPM 50:1 x 2 = $243
- Motor Driver: IBT-2 x 2 = $11
- Power Supply: HP Server 12V 750W = ~$20
- I got it free from a friend but you can get them for $20
- Hall effect frictionless position sensors (10-pack) = ~$3
- Magnets = ~$7
- Arduino R3 clone = $10
- Arduino Pro Micro clones x2 = $14.5
- UCP202 Pillow Block Bearing x 4 (for U-joint) = $20
- Rod Ends M12 x 4 = $15
- Rods M12 x 25cm x 2 = $17
- Bolts and nuts = ~$30 but I had them lying around so free for me
- Lumber = ~$30 but I had some 2×4 and other scraps lying around as most people have.
- Fighter-style swithch covers = $5
- Large switches = ~$15
- End switches = ~$4
- Arduino Leonardo x2 = $16
- Assorted Switches = ~$8
- Assorted Buttons = ~$9
- Potentiometers = ~$4
- Power switches = ~$5
- Bearings = $3
- Encoders = $9
TOTAL: ~$430
Roughly equivalent off-the-shelf rig budget (USD):
- DOFReality H2 2DOF 2-motor motion platform (with shipping) = ~1730
- Racing seat (basic) = ~$100
- Thrustmaster pendular yoke (smaller travel and less rotation than mine) = $358
- Honeycomb Bravo Throttle Quadrant = $250
Thrust Reversers on it act as buttons! Also only one button on the lever. Mine are full range axes, and has both TO/GA and T/A disconnect buttons. I also have a better gear lever. - Logitech pedals = $170
- Thrustmaster HOTAS + Joystick with extension = $610
- HOTAS Mounts = ~$180
- Logitech G Pro Flight Switch Panel = $85
I have more and better switches and better gear lever. - Logitech G Pro Flight Radio Panel = $150
it has displays but in VR they aren’t usable - Logitech G Pro Flight Multi Panel (AP) = $130
It has displays but in VR they aren’t usable, and finding buttons in VR would be virtually impossible. Mine are logically placed for easy tactile feedback. - Virpil Helicopter Collective controller = ~$450
Mine isn’t as realistic, but has all same functionality. This is the cheapest collective controller I could find for comparison.
TOTAL: ~$4213 USD (not including taxes).
Now, that unintentionally (honest!) came to almost precisely an order of magnitude larger than my budget! So for 10 times the money you can have a nicer-looking, more polished and possibly more reliable rig, on a more rigid metal frame (that can be a disadvantage from what I hear, as movements are too jarring) that’s more difficult to convert for each task, and in some ways has worse controllers, definitely less suited for using in VR blindly. Otherwise functionality is the same.
And how it looks is not important, as you can’t see it while flying in VR anyway! BTW I may be biased, but my rig doesn’t look half-bad, in a geeky-wire-exposed-rough-cut-visible-circuitry way. And while I haven’t tried the new Thrustmaster yoke, I doubt it feels as smooth and fluid and my yoke has longer travel – 24cm vs 21cm in theirs, and a larger rotation range: 180 degrees vs 150 degrees, and much larger pivot so it’s closer to the real one as it doesn’t rotate as much as it travels back and forth. And Thrustmaster has a kind of soft center detent. Mine doesn’t, which is much more realistic. You can’t even feel the center with my design.
If you like to design and build your stuff and can enjoy building such a rig, it’s a no-brainer! Do it!
Support me on Patreon
Donate with PayPal
Buy Me a Coffee
ROMAN DESIGN MOTION VR COCKPIT – FULL DEMO VIDEO
Here is the full overview and demo video. It’s 1 hour long, but you have chapters so you can skip to what you find interesting. It has a detailed control overview, short test flights in different configurations – Yoke + Throttles, Joystick + HOTAS Throttle, Cyclic + Collective (helicopter), encoder and switch boxes walkthrough and implementation, and even an experimental hand tracking demo.